小鱼的go2 git库地址:https://github.com/fishros/simdog 在Gazebo中为宇树Go2机器人添加Velodyne雷达和D435i深度相机。 照git readme的说明一步步来就可以。
推荐环境:Ubuntu22.04,ROS2 humble
安装ros2 humber
wget http://fishros.com/install -O fishros && . fishros
安装依赖
sudo apt install ros-humble-gazebo-ros2-control
sudo apt install ros-humble-xacro
sudo apt install ros-humble-robot-localization
sudo apt install ros-humble-ros2-controllers
sudo apt install ros-humble-ros2-control
sudo apt install ros-humble-velodyne
sudo apt install ros-humble-velodyne-gazebo-plugins
sudo apt-get install ros-humble-velodyne-description
安装liosam依赖
sudo apt install ros-humble-perception-pcl \
ros-humble-pcl-msgs \
ros-humble-vision-opencv \
ros-humble-xacro
Add GTSAM-PPA(可选)
sudo add-apt-repository ppa:borglab/gtsam-release-4.1
sudo apt install libgtsam-dev libgtsam-unstable-dev
安装 rosdepc
sudo apt install -y python3 python3-pip
sudo pip3 install --upgrade pip
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
克隆代码并构建代码
git clone https://github.com/fishros/simdog.git -b main -o go2_ws
sudo rosdepc init
rosdepc update
cd 到项目目录
rosdepc install --from-paths src --ignore-src -r -y
colcon build --symlink-install
构建可能比较久,并且与电脑内存cpu相关,建议将内存配大一点,容易出现内存溢出问题
 这种情况
rm -rf build log install
这种情况
rm -rf build log install
colcon build --packages-select lio_sam --parallel-workers 1
启动项目
bash start.sh
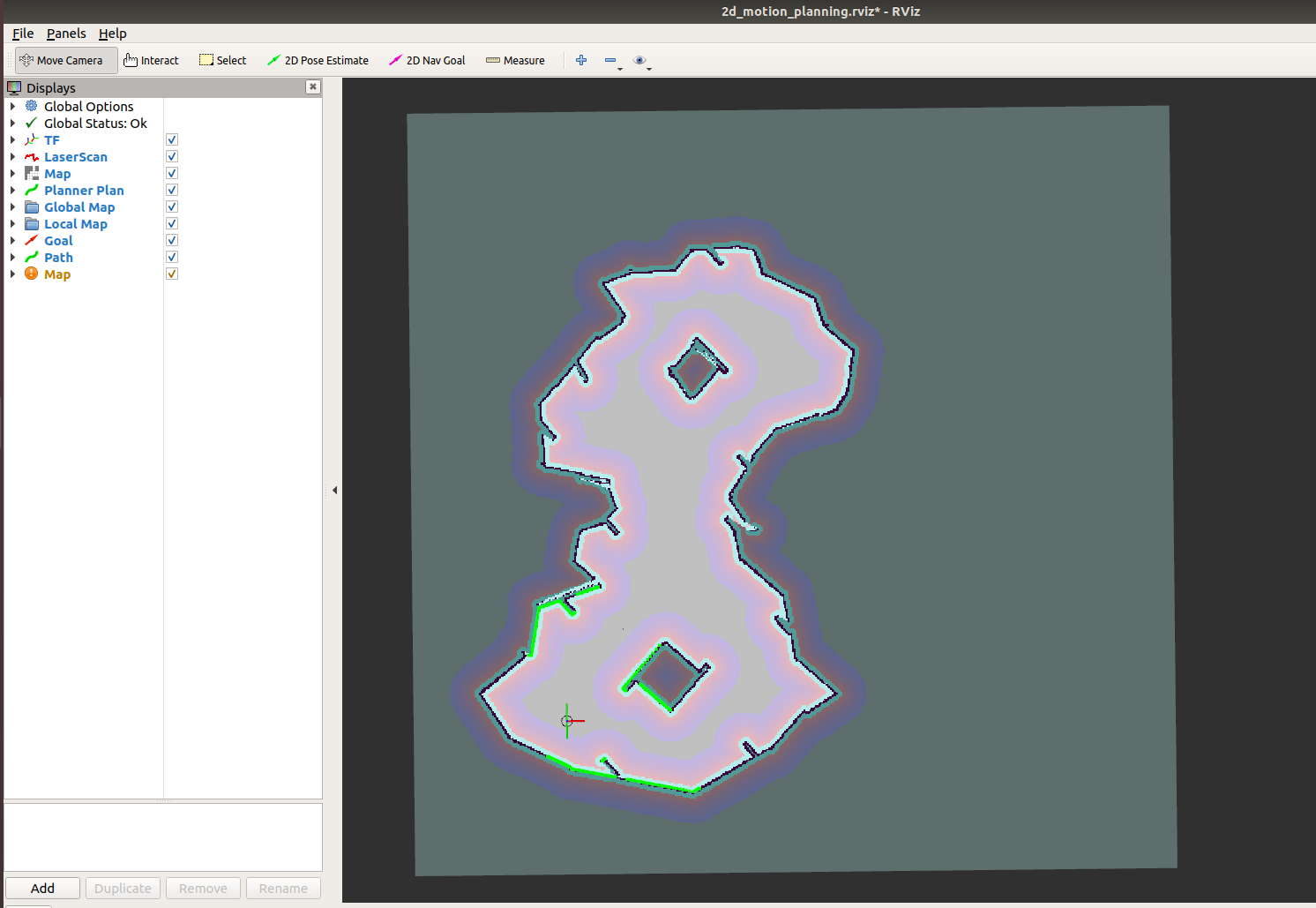
效果

报错解决
cd 项目目录 source install/setup.bash
ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 odom base_link
ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 odom base_footprint
最后效果
